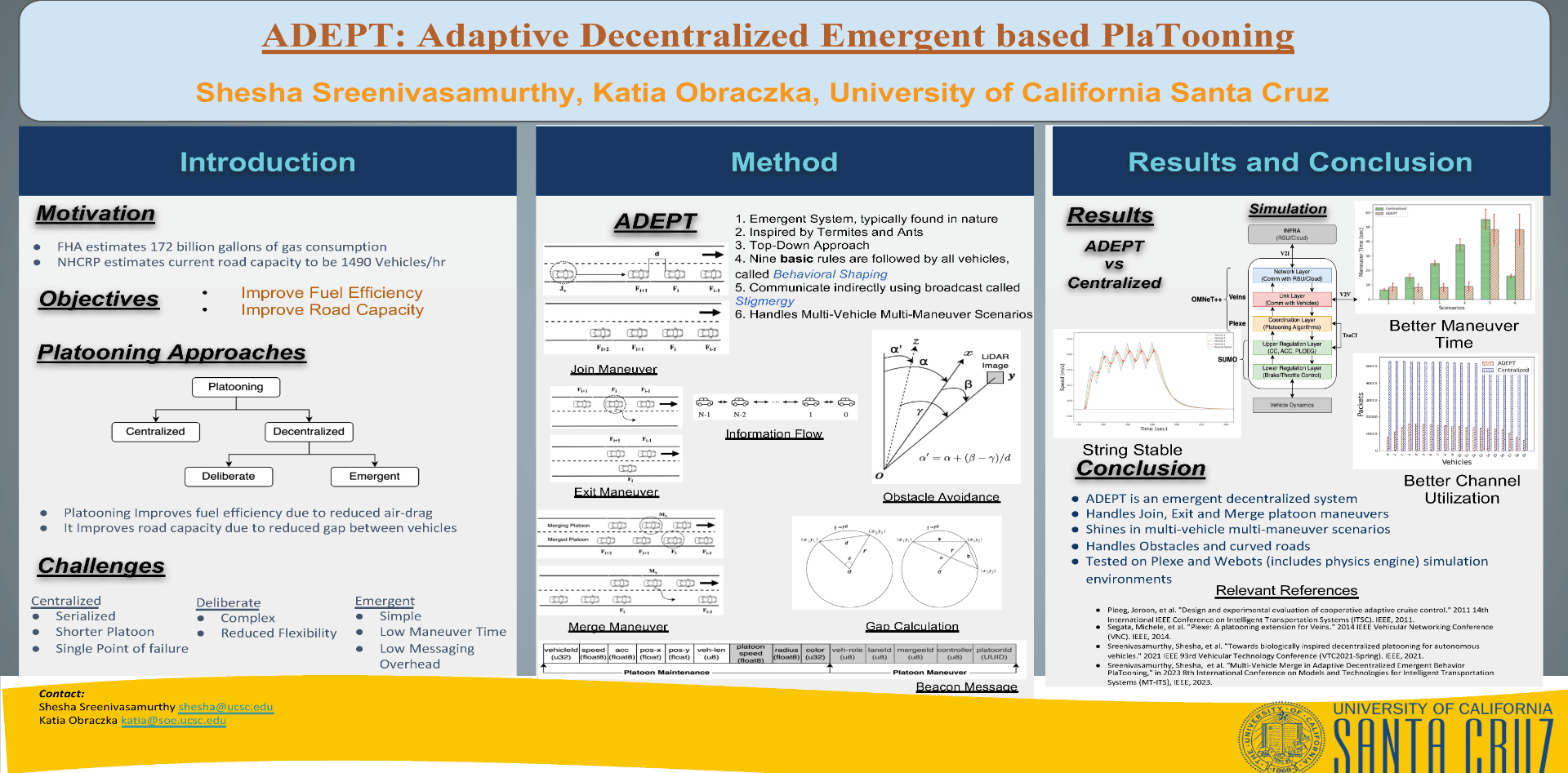
Vehicles following each other in close proximity, in the form of a platoon to reduce fuel consumption due to reduction in air drag is not a new concept. Introduction of vehicle-to-vehicle communication has led to further decrease in inter vehicular spacing, enabling further reduction in fuel consumption and improving the road capacity. Formation and dissolution of the platoon is generally governed by the lead vehicle, leading to a centralized approach. This suffers from various drawbacks such as serialization of maneuvers, shorter platoon length and packet loss. A decentralized approach mitigates these issues and is traditionally realized using the top-down approach by first identifying the maneuvers and then implementing the messages required. Such a system is termed as a “Deliberate System“. We have developed ADEPT – Autonomous Decentralized Emergent-behavior based Platooning, to mitigate the problems of centralized system using a novel decentralized approach to automated vehicle platooning inspired by “Emergent-Behavior” commonly found in biological systems. In ADEPT, each vehicle follow simple rules when they need to interact in order to carry out maneuvers. Platooning maneuvers such as join, exit, and lane change “emerge” as a result of vehicles following these “emergent rules”. Preliminary complexity analysis as well as simulation experiments yield promising results that demonstrate emergent-behavior based platooning as a promising form of decentralized platooning.
Publications
S. Sreenivasamurthy and K. Obraczka, “Towards Biologically Inspired Decentralized Platooning for Autonomous Vehicles,” 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), 2021, pp. 1-7, doi: 10.1109/VTC2021-Spring51267.2021.9448731. pdf
S. Sreenivasamurthy and K. Obraczka, “Multi-Vehicle Merge in Adaptive Decentralized Emergent Behavior PlaTooning” 2023 IEEE 8th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS 2023) pdf.
Collaborators
Shesha B. Sreenivasamurthy (UCSC), Katia Obraczka (UCSC)